Yin Zhou et Oncel Tuzel, deux scientifiques travaillant chez Apple ont publié sur ArXiv.org leurs recherches détaillées consacrées à VoxelNet. Il s'agit d'un logiciel chargé d’analyser les données des radars tridimensionnels LIDAR (détection par laser) afin de détecter avec davantage de précision ce qui entoure le véhicule.
Cette publication a surpris les chercheurs et observateurs, d'autant plus qu'elle a été partagée sur ArXiv et non sur le blog d'Apple consacré au machine learning. La conduite autonome est un véritable enjeu pour de nombreux acteurs du secteur. Ce type de système repose sur des capteurs spécifiques, les radars LiDAR, et sur des caméras plus conventionnelles. La combinaison des deux permet d'améliorer la détection et la reconnaissance des éléments 3D (objets, personnes, etc.) autour du véhicule.
Une simulation informatique réussie amenée à être testée sur route
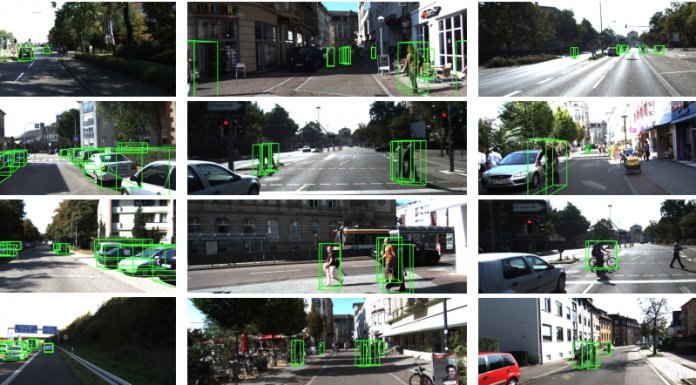
Étant donné ses résultats encourageants, VoxelNet permettrait de simplifier ce processus. Le logiciel développé par Yin Zhou et Oncel Tuzel réduit en effet sa complexité et son coût grâce à l'utilisation d'algorithmes de deep learning. Le logiciel visualise tous les objets 3D et divise l'espace en nuages de points. Les données ainsi obtenues permettent ensuite au réseau de neurones de reconnaître le type d'éléments dont il s'agit (piéton, objets, voiture, etc.). Il leur affecte une boîte de projection et anticipe leur déplacement.S'il ne s'agit pour l'instant que de simulation informatique et de recherche appliquée mais le logiciel pourrait constituer une étape importante du développement des nouvelles technologies. La détection fiable des objets et personnes est en effet fondamental en robotique, réalité virtuelle et augmentée et bien évidemment en ce qui concerne les voitures autonomes.